I社
屋内遠隔操作ロボットの動線取得

課題
同ロボットは遠隔操作で展示会に参加できるサービスです。動き回るロボットの現在位置を正確に把握する手段がありませんでした。
また展示会場は多くの電波が飛び交う環境です。ビーコン等の測位方式では精度が出ないことが問題でした。
導入効果
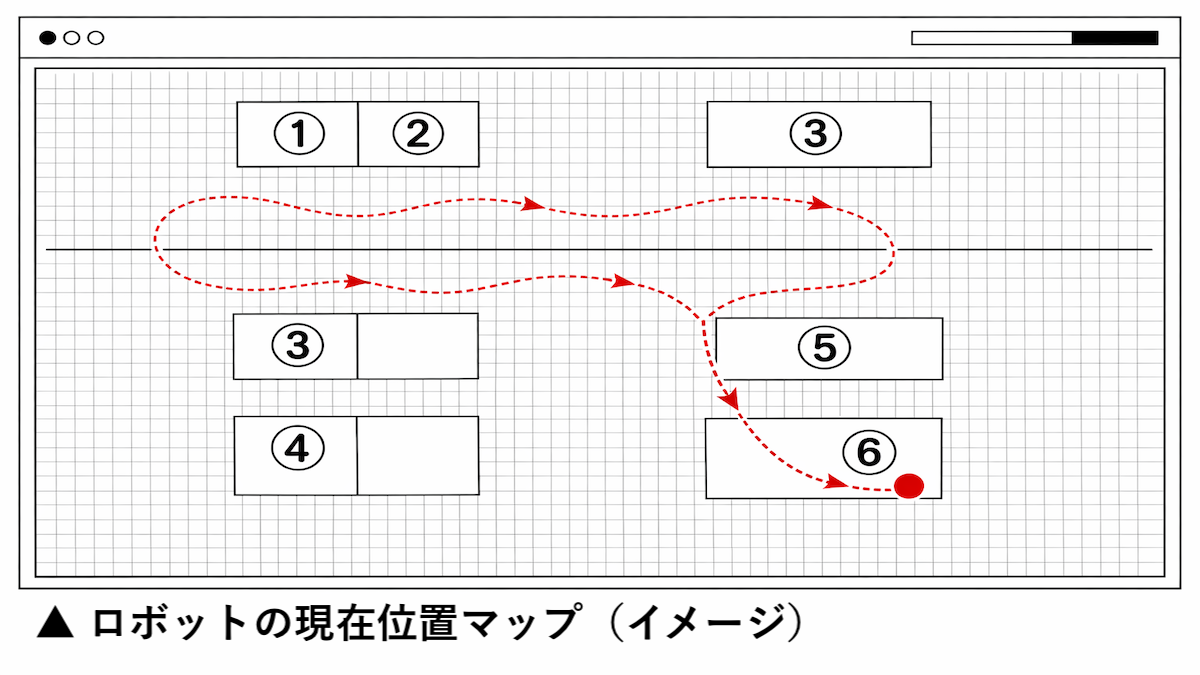
ロボットの詳細な動きがリアルタイムで可視化され、操縦者が移動情報を目視確認し現在位置を把握できるようになりました。
また、移動ルートやブースの訪問回数等を定量的に把握できるようになりました。展示会における利用者のニーズ分析にも繋がっています。
使用ソリューション
ギャラリー